Researchers
Zeynep Bromberg, Harvard Mechanical Engineering
Advisors: Dr. Robert Howe, Dr. Brooke Ellison, Harvard; Dr. Kathleen D. Klinich, UMTRI
Abstract
Millions of Americans across the country have physical disabilities that cause them to be reliant upon wheelchairs for mobility. Most public transit systems in the US are not fully wheelchair accessible. Indeed, despite the fact that the Americans with Disabilities Act mandates fully accessible transit sites for newly constructed systems, older systems are “grandfathered in” – almost three-quarters of NYC’s subway stations are not accessible.
Ride share apps such as Uber and Lyft present a unique solution to this problem. In several major U.S. cities, Uber offers a service called Uber Wheelchair Accessible Vehicle, or Uber WAV. There are countless benefits to rideshare, including convenience, safety, and dynamic pricing. Services like Uber WAV have the added benefit of being equipped with wheelchair securement systems. However, there are currently no widely-manufactured technologies for universal autonomous wheelchair docking – wheelchair securement without the help of a third-party. Any wheelchair user who charters a service such as Uber WAV will need to have their chair and personal seatbelt manually secured by the Uber driver.
This means that although services like Uber WAV are self-characterized as “accessible,” they would not be considered as such by many members of the disabled community because they require third-party assistance for securement. Not only are these technologies not fully accessible, they would also impede wheelchair users from taking advantage of future autonomous vehicle (AV) technology, which recent research has suggested could be a crucial opportunity for wheelchair users to achieve further flexibility and power to be in control of their own mobility.
Many wheelchair users (of both manual and power chairs) are unable to transfer themselves to built-in vehicle seating and must remain seated in their own wheelchairs. To guarantee the safety of these passengers, it is necessary to mechanically secure the wheelchair to the moving vehicle. Together with a separate component to provide occupant protection such as a seat belt, these are referred to as a Wheelchair Tiedown and Occupant Restraint System (WTORS). For AVs to be fully accessible by wheelchair users they must be equipped with a WTORS that is “crashworthy for use in smaller vehicles, able to be used without third-party assistance, and able to accommodate a wide range of wheelchair types.”
The UDIG, or Universal Docking Interface Geometry, designed in 2007 by Douglas A. Hobson and Linda van Roosmalen allows for a wide variety of designs of wheelchairs and securement systems to comply, by creating a common interface geometry that matches the chair to the car, similar in philosophy to a tractor trailer hitch.
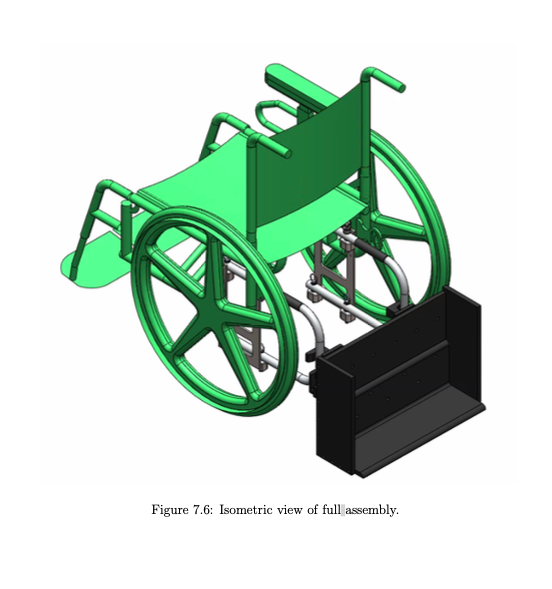
The current UDIG mechanisms have been rigorously vetted and crash-tested: they work, and they work well. However, the design is not manufactured or sold to the public, and has remained research-grade since its inception. The ultimate goal of this ES 100 project is to improve upon the UDIG design to make it attractive to consumers, and thus incentivize mass production. Minimizing mass is a high priority for wheelchair users. Therefore, this project will result in the design and evaluation of a lightweight, quick-release, portable UDIG attachment that will allow wheelchair users to secure themselves into moving vehicles autonomously, but not force them to keep the attachment on their chairs at all times.
Results